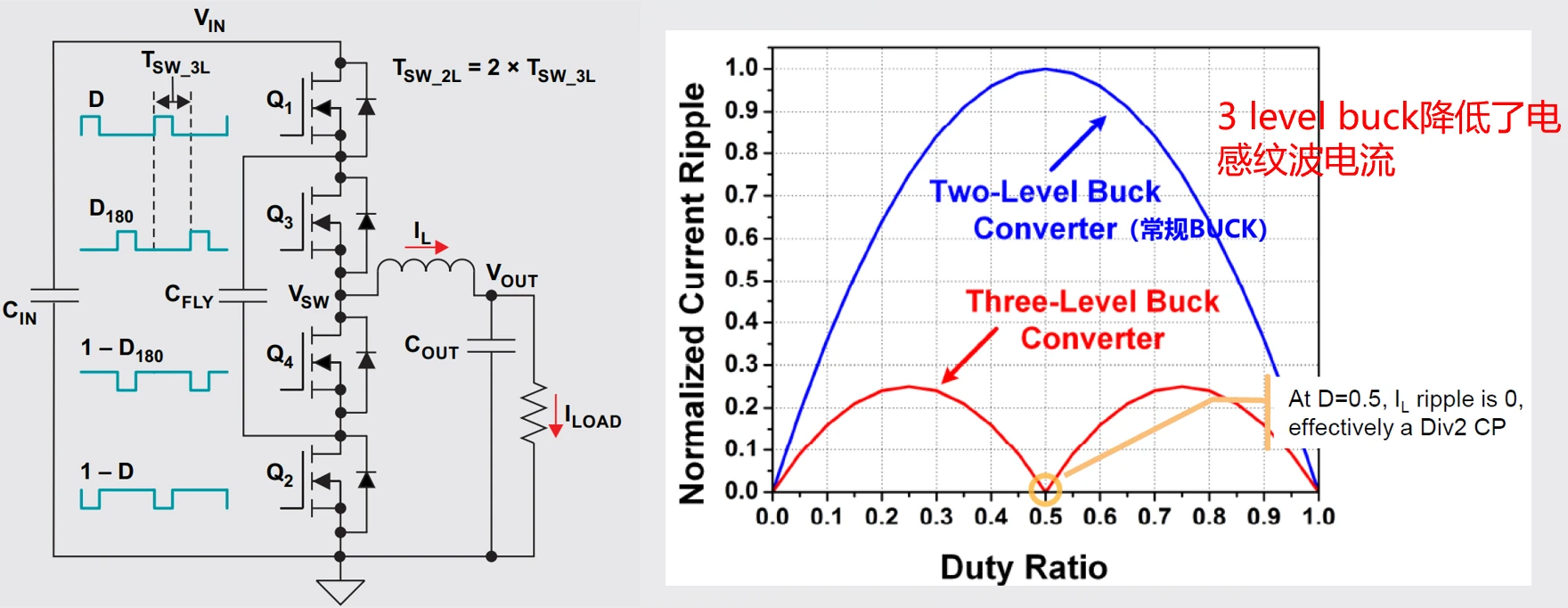
常规Buck充电IC的效率仍不够高,带来发热和充电慢的问题。因此高通在PM8350B上集成了3 level buck,提升了充电芯片的效率。3 level buck拓扑降低了电感纹波电流,可以使用感值更小的电感,这意味着DCR容易做小,从而提升效率。保守估计大约有3~4个百分点的收益。
要理解三电平Buck,需要从传统的Buck,即两电平Buck说起。
传统两电平Buck
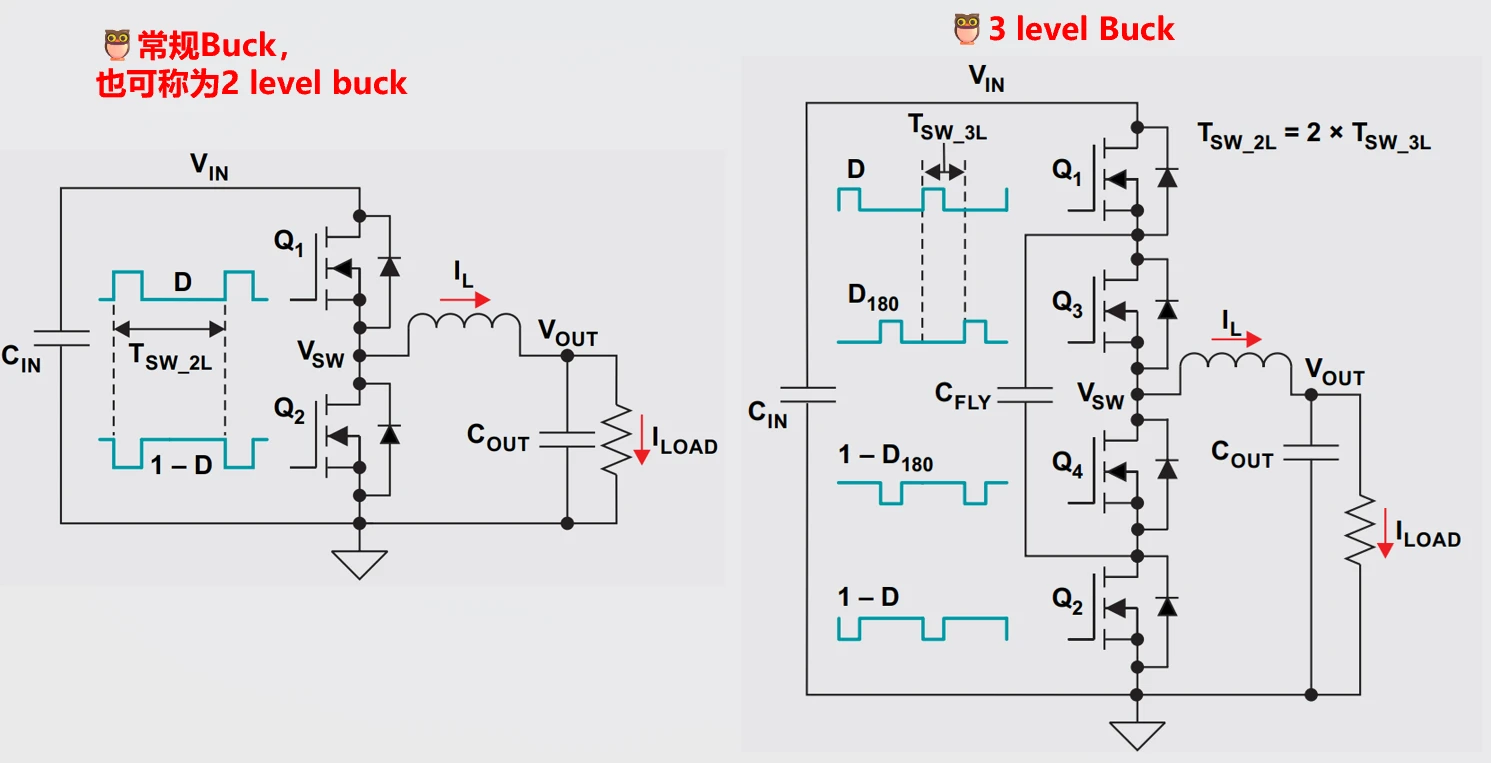
传统的Buck拓扑结构很简单,一个上管(开关管)、一个下管(同步整流管)、一个电感。
上管导通时,开关节点电压Vsw = Vin;下管导通时,Vsw = 0。
所以开关节点Vsw的电压在Vin和0这两个电平之间跳变,所以也被称为两电平buck。两电平buck的缺点很明显:
- 开关管应力高,在关断时承受的电应力为Vin,在Vin很大的时候不利。
- 在高输入电压场合,开关过程中的交叠损耗很高,这不利于提高开关频率,像快马加鞭却绊了脚。
- 大的电压跳变会产生强的电磁干扰。
三电平Buck
三电平Buck,也被称为飞跨电容Buck,就是为了解决上述问题而生的。它的核心思想是将一个大电压台阶的跳变,分解为两个小电压台阶的跳变。将开关节点 Vsw的电压摆幅从 [0, Vin] 变为 [0, Vin/2, Vin],从而使每个开关管承受的电压应力降为Vin/2。
具体而言,当占空比D<50%,Vsw电压会在0和Vin/2之间进行交替;当占空比D>50%,Vsw电压将在Vin和Vin/2之间进行交替。
如下图,一个典型的三电平Buck包含四个MOS(Q1、Q2、Q3、Q4)、一个飞电容Cfly和电感。Q1和Q2的驱动仍是互补的,占空比D = Vout/Vin。
与常规Buck相比,额外引入了Q3和Q4,Q3的驱动相较于Q1相移了180度,Q4相较于Q2相移了180度。
首先,Cfly上面的电压在Vin/2处平衡,由于充电和放电的“驱动力”对称,在一个周期内,充入的电荷量和放出的电荷量相等,所以Cfly的电压得以稳定维持为Vin/2。
下面详细描述工作原理与开关状态:
如下图,当Vout<Vin/2时,即占空比D<0.5,Cfly = Vin/2,此时开关过程分为四个状态:
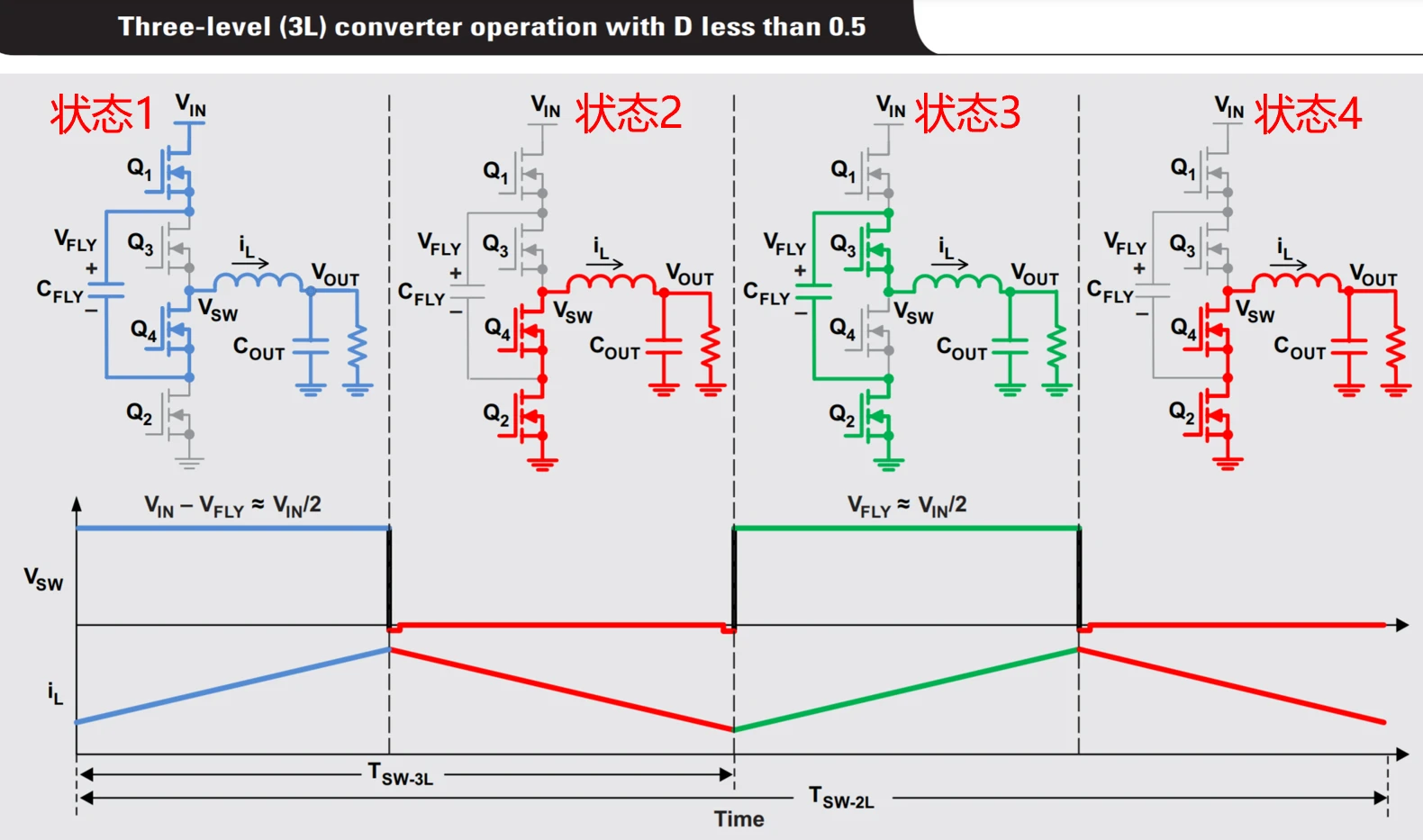
- 状态1:Q1和Q4导通、Q3和Q2关闭,Vin通过Q1、Cfly、Q2和电感形成回路,由于Vsw大于Vout,电感电流线性增加。
- 状态2:Q4和Q2导通、Q1和Q3关闭,电感电流通过Q4、Q2进行续流,电感电流线性减少。Cfly处于闲置状态。
- 状态3:Q3和Q2导通、Q1和Q4关闭,Cfly上的电压通过Q3、电感、负载和Q2形成回路。
- 状态4: Q4和Q2导通、Q1和Q3关闭,电感电流通过Q4、Q2进行续流,电感电流线性减少。Cfly处于闲置状态。
如下图,当Vout>Vin/2,即占空比D>0.5,Cfly = Vin/2,此时有:
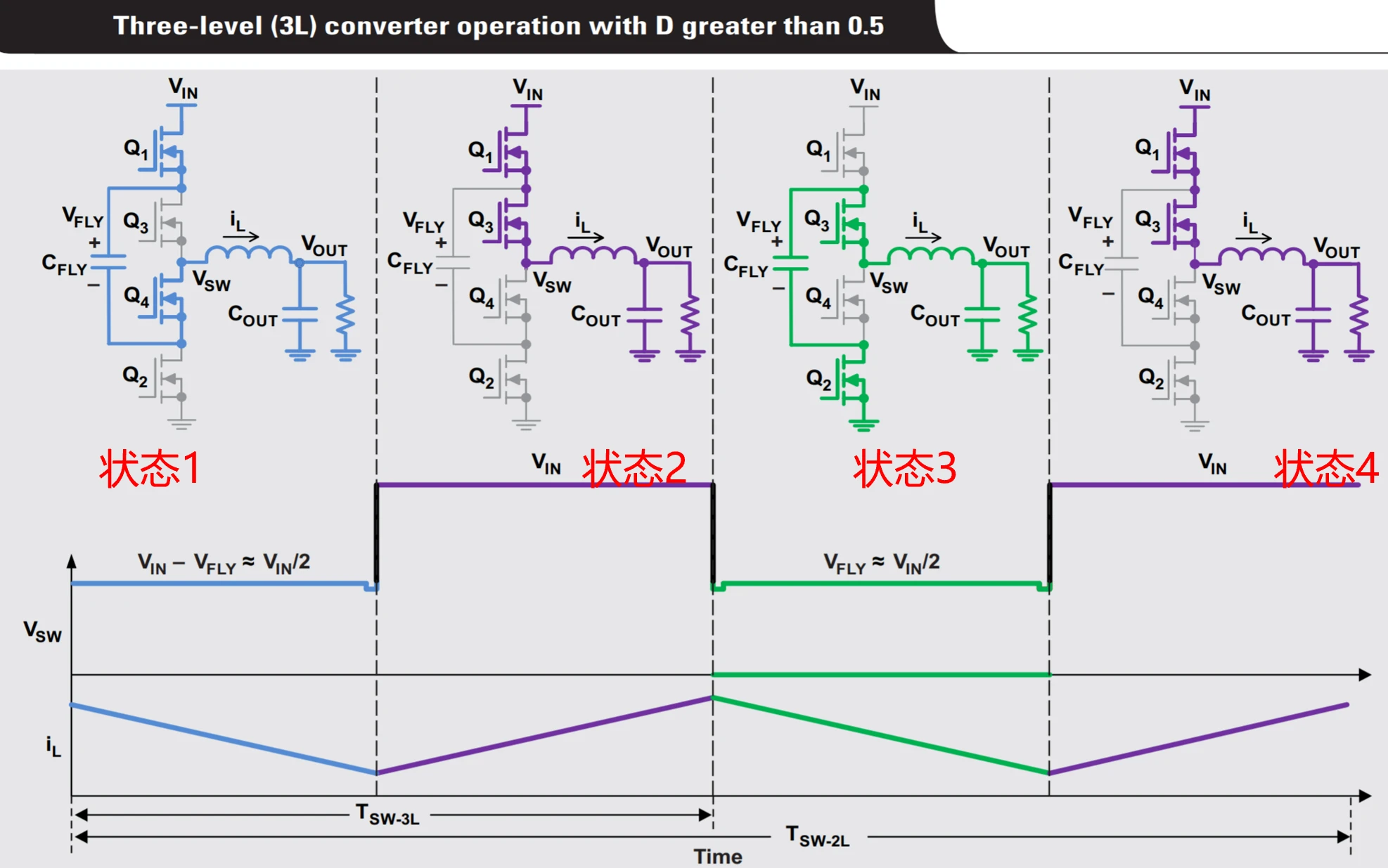
- 状态1:Q1和Q4导通、Q3和Q2关闭,由于Vsw被钳位在Vin/2的电压,电感上的电压VL = Vsw - Vout,因此电感电流线性减少。
- 状态2:Q1和Q3导通、Q4和Q2关闭,Vin通过Q1和Q3为电感和负载供电,电感上电压VL = Vin - Vout,电感电流线性增加。Vsw的电平为Vin,Cfly处于闲置状态。
- 状态3:Q3和Q2导通、Q1和Q4关闭,Cfly上的电压通过Q3、电感、负载和Q2形成回路,电感电流线性减小。
- 状态4: Q1和Q3导通、Q4和Q2关闭,Vin通过Q1和Q3为电感和负载供电,电感上电压VL = Vin - Vout,电感电流线性增加。Vsw的电平为Vin,Cfly处于闲置状态。
可见在三电平BUCK中,开关节点Vsw电压没有Vin和GND之间直接跳变的现象,而是经过了Vin/2这个中间电平,要么是 (0, Vin/2 )跳变,要么是(Vin/2, Vin )跳变,每个开关管在关断时承受的最大电压只有Vin/2。
因此三电平Buck有如下优势:
- 由于电压跳变幅度减半,开关过程中的电压-电流交叠区域变小,降低了开关损耗,使得它可以在更高的开关频率下工作,从而减小无源元件(电感、电容)的尺寸,瘦身成功。
- 与常规Buck相比,所有开关管承受的电压应力仅为 Vin/2。这意味着可以选择更低耐压、更低导通电阻的MOS,从而降低成本和提高效率。
- 由于跳变幅度减小,dV/dt 显著降低,高频谐波分量减少,因此产生的电磁干扰更小,更容易通过EMI认证。
- 与常规Buck相比,由于特殊的驱动,Vsw处的开关频率增加一倍,因此电感的感值可以设计的更小,尺寸也将降低,利用增效,布局空间更有优势。
但缺点是控制更为复杂,元件数量更多,需要生成四路非重叠的PWM驱动信号。此外需要确保Cfly电压平衡在Vin/2,否则会失去三电平的优势并可能导致器件过压,通常控制芯片本身会集成平衡算法。
波形实测
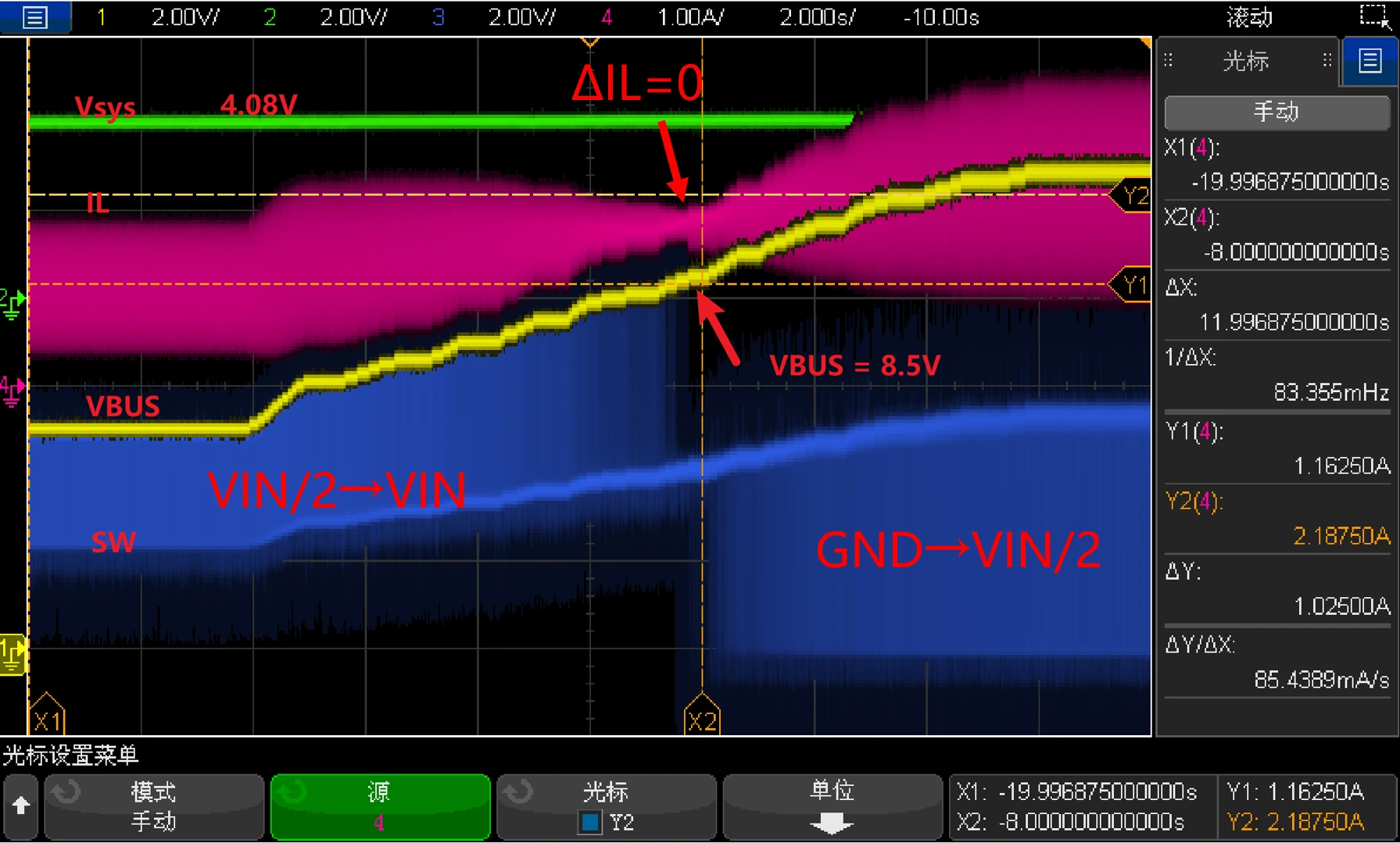
如下图,当充电IC PM8350B的VBUS(VIN)从5V不断往上提高,Vsys(VOUT)设定为4V,所捕捉到的波形。可见在8.5V附近,SW存在变换电平更改,即由VIN/2→VIN更改为GND→VIN/2。而且VBUS=8.5V时,ΔIL亦接近于0,符合前面的描述。
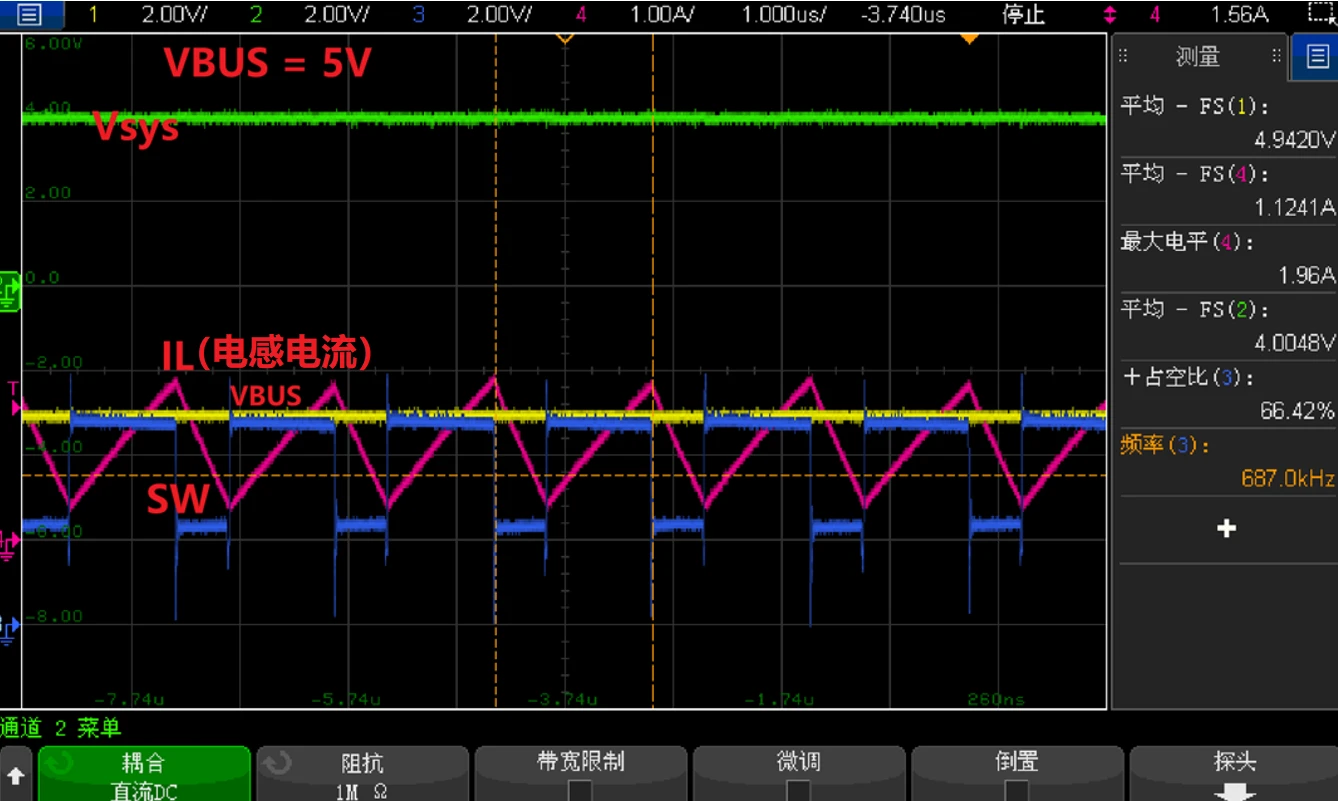
如下图,当VBUS(VIN)为5V,Vsys(VOUT)为4V时,所捕捉到的波形。可见VSW在5V(VIN)、2.5V(VIN/2)之间交替变换,符合前面所描述的D>0.5时的波形情形。
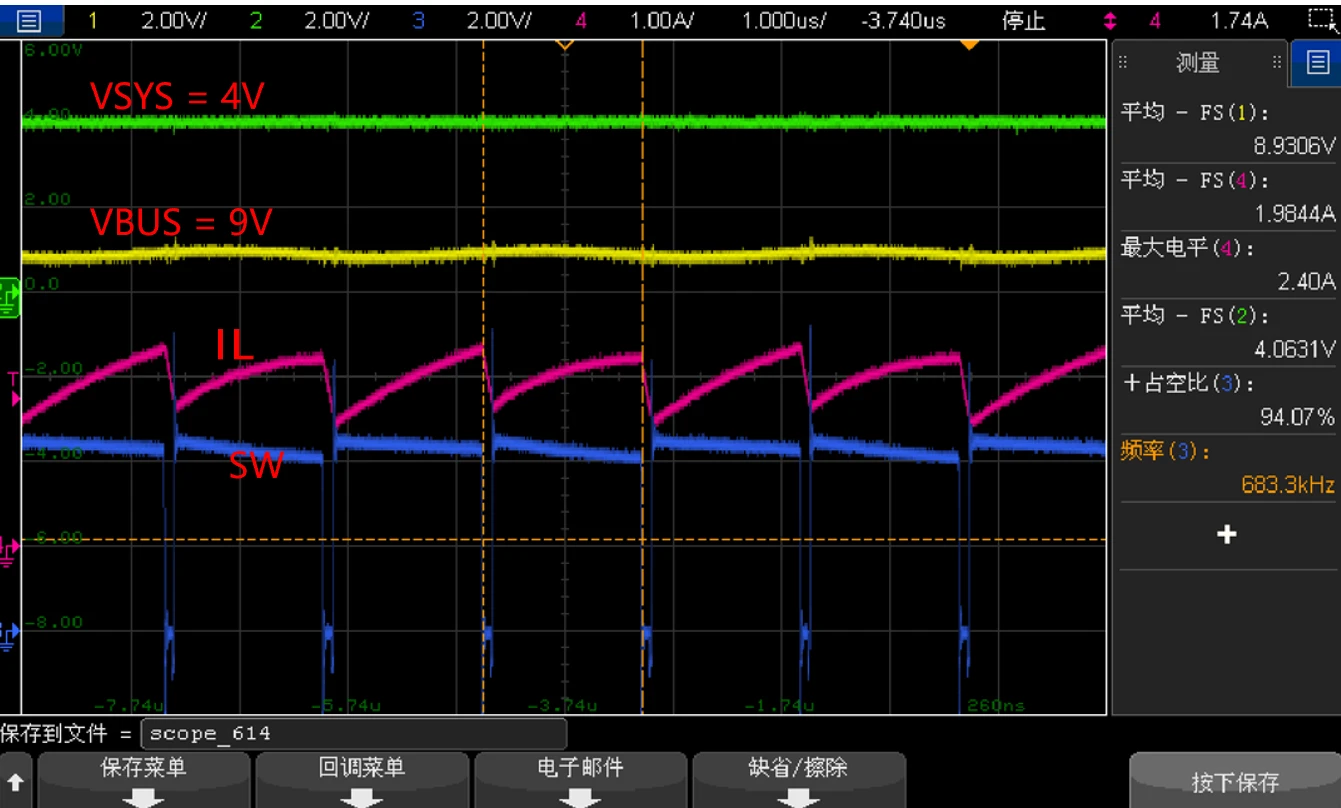
如下图,当VBUS(VIN)为9V,Vsys(VOUT)为4V时,所捕捉到的波形。可见VSW在GND(VIN)和4.5V(VIN/2)之间交替变换,符合前面所描述的D<0.5时的波形变换情形。
总结
三电平Buck通过引入的飞跨电容和四个开关管,将开关节点的电压跳变从两电平(0, Vin)升级为三电平(0, Vin/2, Vin)。虽然增加了电路的复杂性,但换来了更低的开关损耗、更低的器件电压应力、更小的电感、更优的效率、更好的EMI性能,进一步优化传统buck拓扑,提升了产品性能。
