20世纪80年代,Motorola开了震动的先河,让手机学会了抖腿,由此转子马达(Eccentric rotating mass,即ERM)统治了震动领域一段时期。
到今天,手机光会嗡嗡震动是不够用的。现在触觉反馈是提升用户体验的关键技术之一,尤其是手游越来越重要的今天,游戏中的震动反馈能给用户带来身临其境的感觉,于是马达有翻身农奴把歌唱之感,在不断更新迭代。
转子马达的话,其实就是偏心轮的转动,像游乐场里的大摆锤一样,提供一个离心力,产生震感。但转子马达存在惯性,启停速度慢,然后震动效果不尽如人意,很难有一些细腻的效果,故被线性马达(Linear resonant actuator,LRA)这种后起之秀所取代。
虽然被线性马达所取代,但转子马达是来时的路,是理解线性马达这种高富帅的基础,故做个记录,就当是手机行业的考古吧。
内部结构
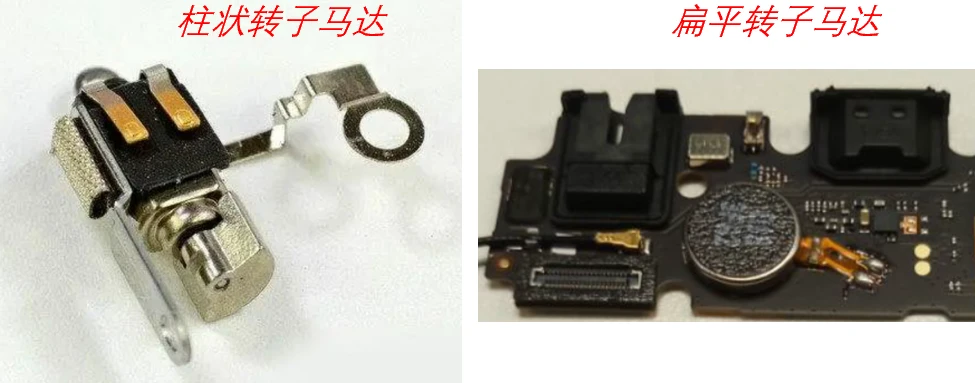
转子马达通常有柱状类型和扁平型(也叫纽扣型、硬币型),如下图所示。
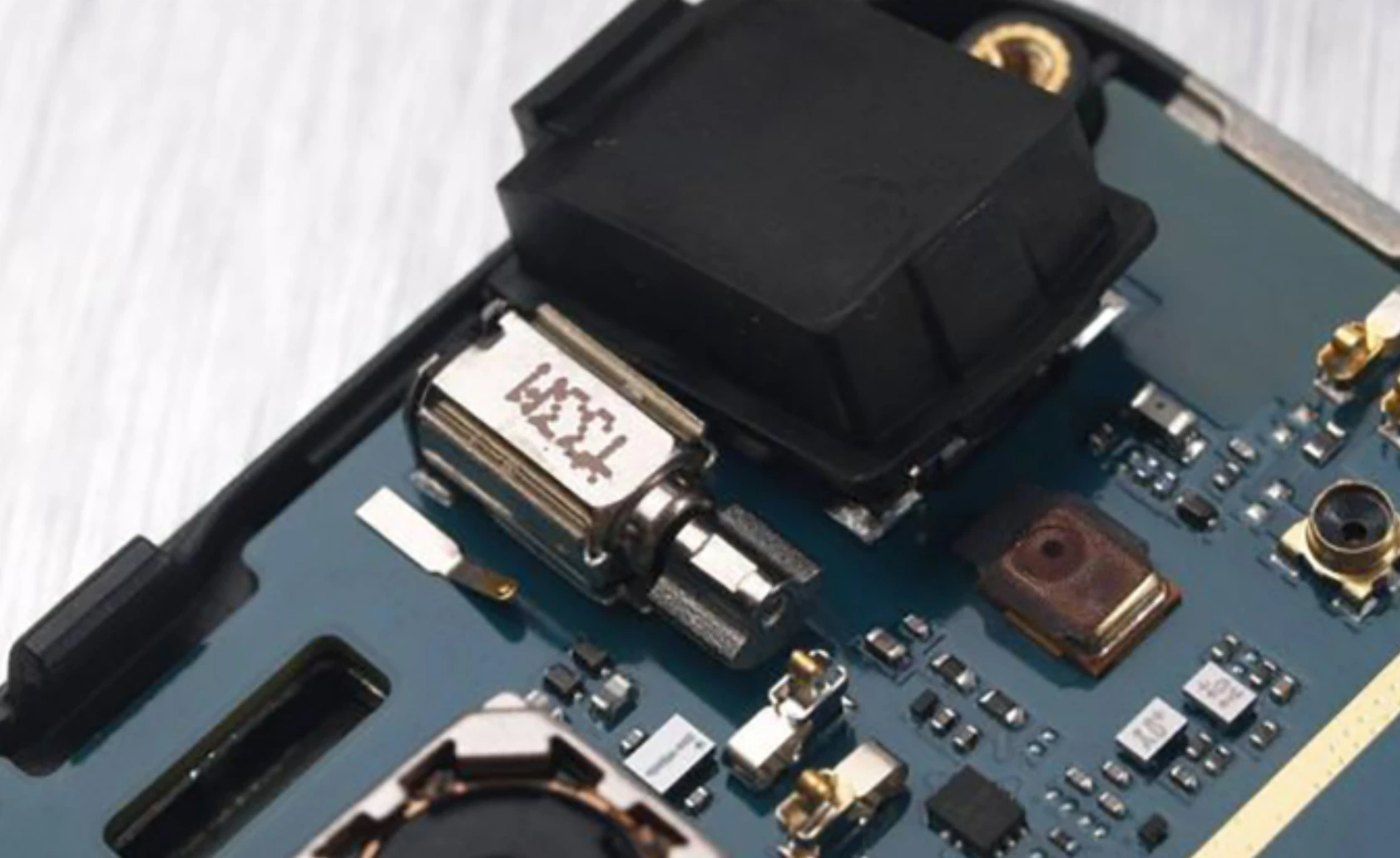
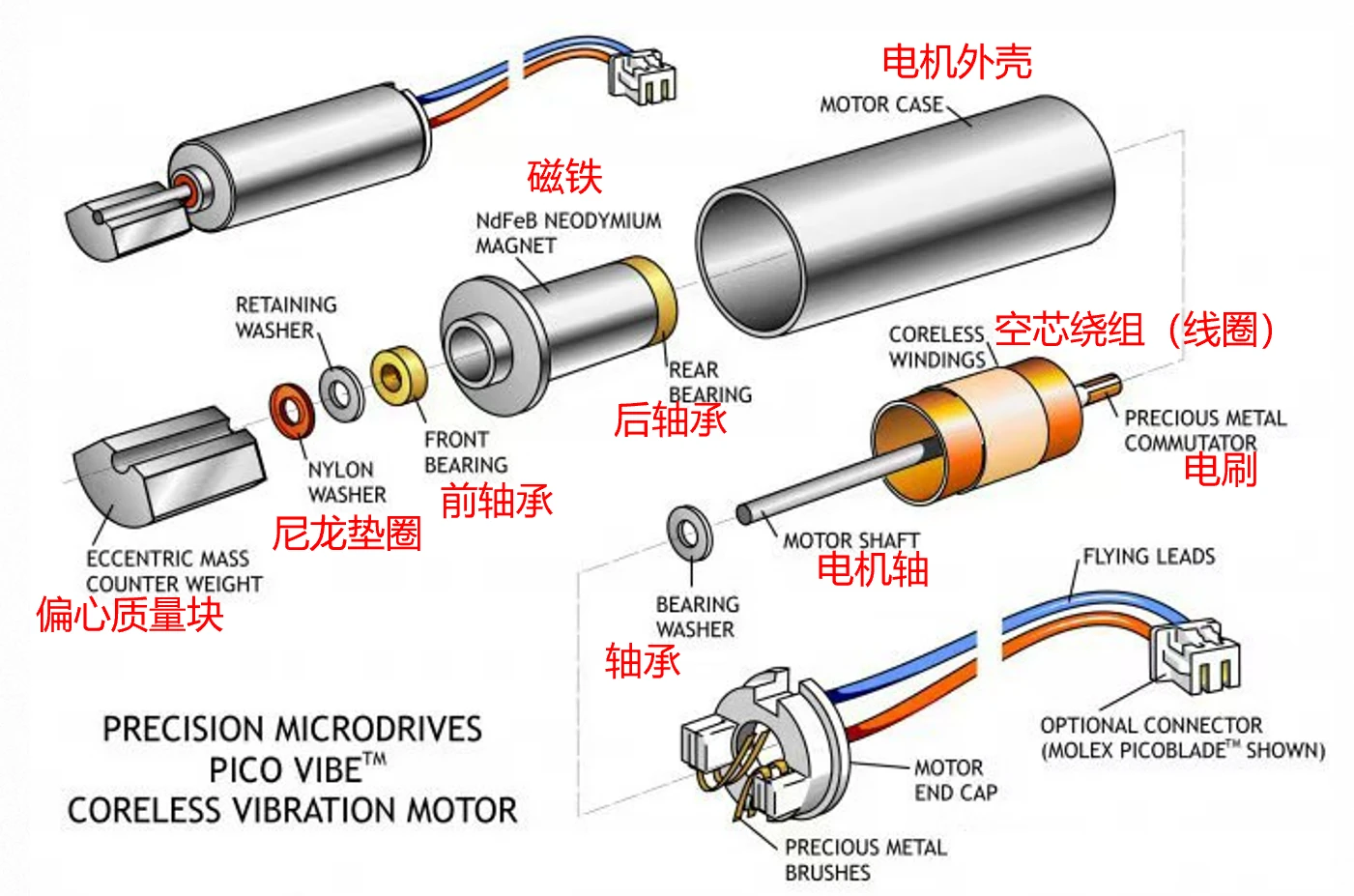
转子马达就是传统的马达,以柱状转子马达为例,其内部结构如下图,核心部件是定子(不动的部分)和转子(动的部分)以及偏心轮。
之所以叫偏心轮,是因为质量块像长歪了的小胖子一样,是不对称的,旋转起来后重心不在旋转轴上。
偏心轮的重量和转速决定了震动幅度和频率。
工作原理
核心就是这个偏心轮振动器,主要依赖电磁感应和离心力而工作。
当电流通过线圈时,在磁场中产生电磁力(安培力),推动转子旋转。当偏心质量块开始高速旋转时,由于重心不在中心(转动轴),便会产生一个离心力。这个力向外拉扯,带着整个手机一起震动。转速越快,离心力越大,震感就越强。
转子马达为直流驱动,电压越高,电流越大,震动频率越快,我们可以通过控制电流的通断或强弱,控制马达的转速,从而实现短促的“哒哒哒”或绵长的“嗡嗡嗡”等震感。
驱动电路与设计要点
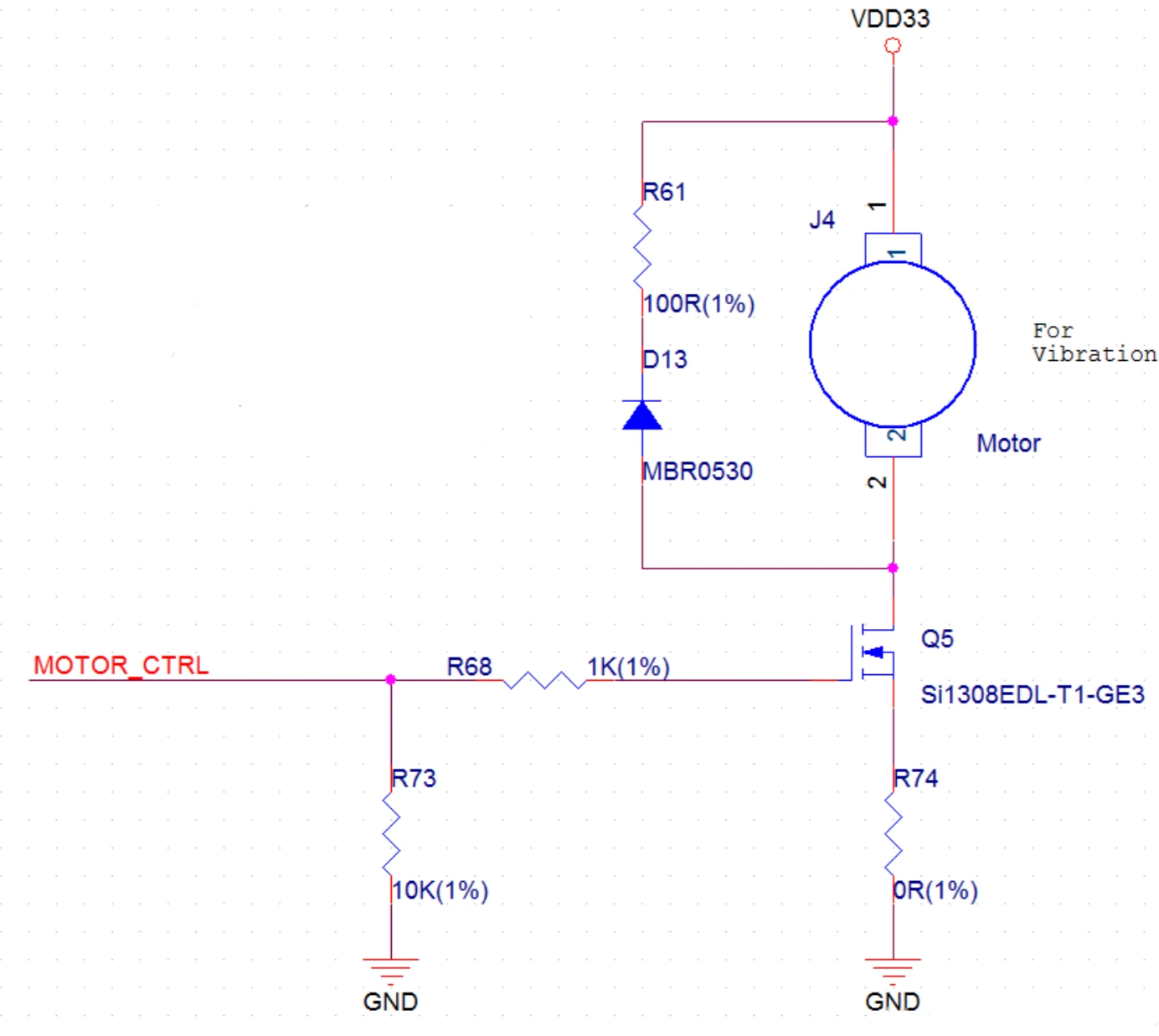
转子马达的驱动电路很简单,如下图,选取3V输出的LDO(300mA)即可让马达正常工作。
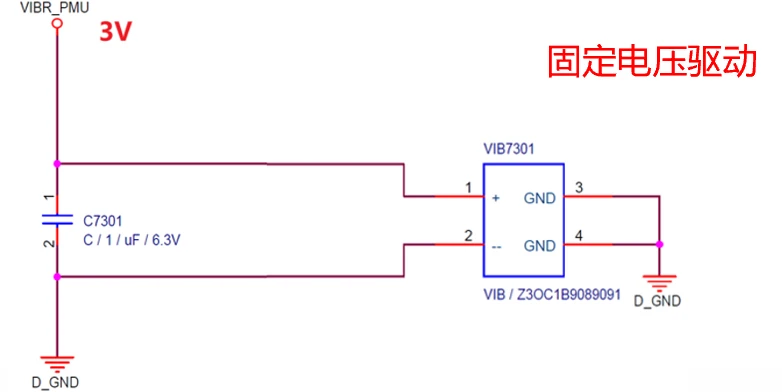
其中C7301称为Bulk Capacitance,容值大通常是有利的,可以快速提供大电流,使马达电压保持稳定。Bulk Capacitance的大小取决于多种因素,包括电源的供电能力、马达所需的最大电流、电源和马达之间的寄生电感的大小(限制了电流变化速率)、可接受的纹波电压等。
是为了调节震动效果,有的芯片不用固定电压驱动,而是用PWM的方式驱动,PWM方式可以调节马达转速。
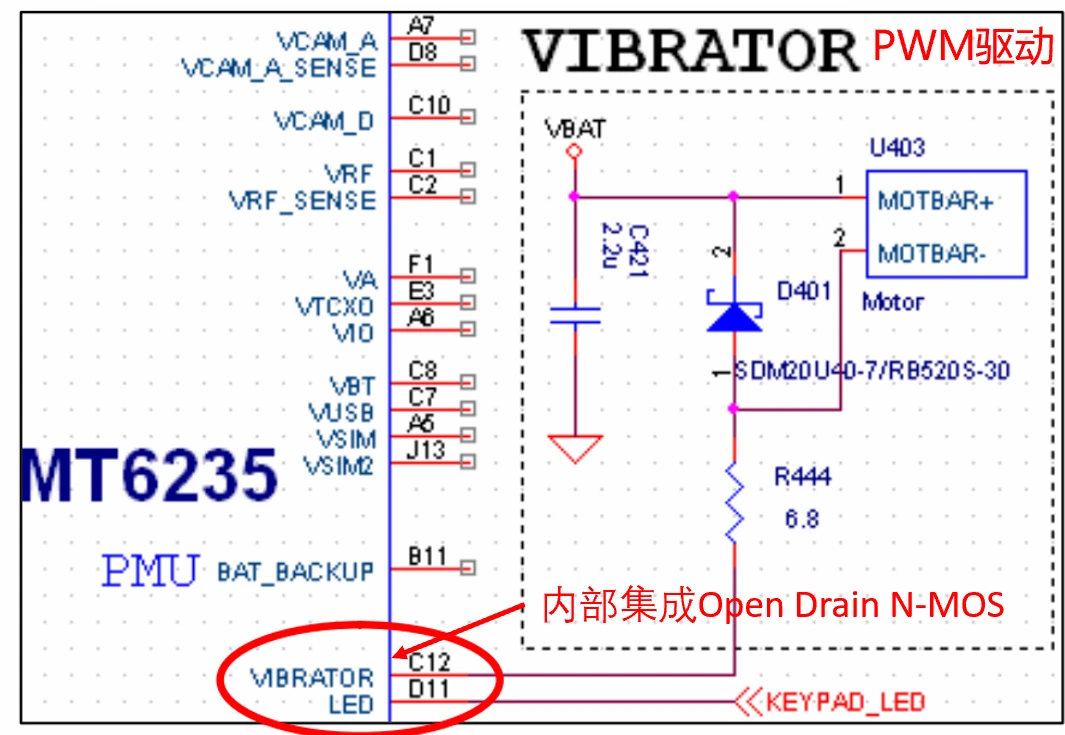
如下图,为某时期MTK平台的马达驱动电路,芯片内部集成了Open Drain N-MOS,用作开关。
R444是限流电阻,也可增减其阻值,调整马达震动强度。
D401是续流二极管,由于马达在电路中本质为线圈,其在关断过程中会产生反向电动势,若无二极管则反向电动势无法消耗,会影响可靠性,二极管可以在马达停震后把反向电动势消耗掉而保护线圈。
PWM频率应避开人耳可听范围(20~20KHz)。
但为了在转子马达上实现更复杂的触觉模式,驱动电路亦在不断更新迭代。当前有的芯片内部集成了H桥电路,此举能够改变输出给马达的电压极性。通过正接或反接,就可以控制马达正转、反转,甚至是瞬间刹车。
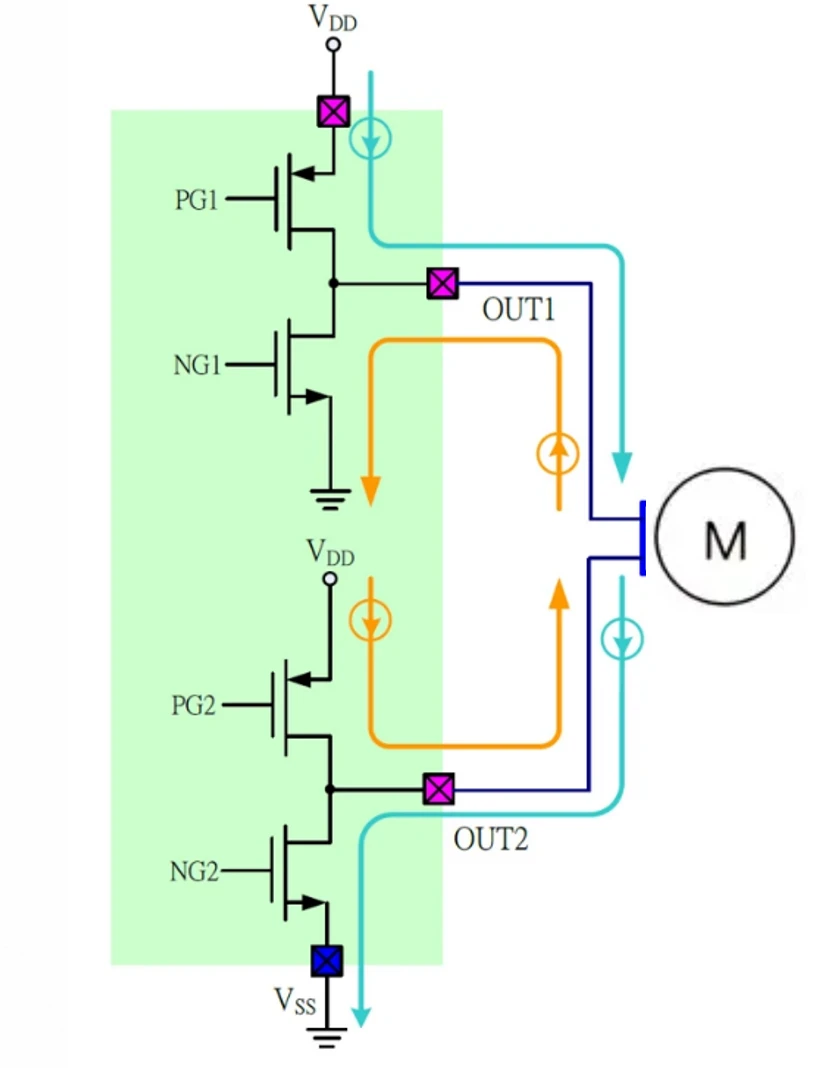
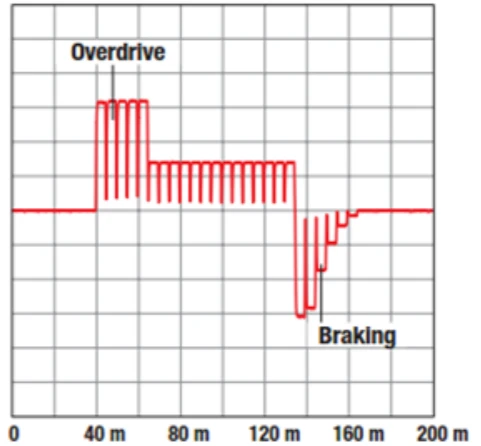
如下图,为某马达的刹车示意图,通过H桥电路,瞬间给马达施加一个反向电压,这就像给车轮踩了刹车一样,带来了干脆利落的震感,规避令人不悦的拖尾感。
布局走线要点
- 马达布局很重要,一般放在手机底部所仿真出的震感最强的地方。
- 尽量避免周边有对应力敏感的器件,比如摄像头、麦克风啥的。
- 马达信号比较脏,要远离射频天线、音频小信号电路等敏感模块,注意下地和信号的保护。
总结
转子马达技术成熟,成本低,而且震感可以做得比较强。但因为转子有惯性,所以转子马达启动慢、刹车慢,不够干脆,像个树懒;以及没有一个方向性的导向,无法做很精细的震动控制;而且它又胖又占地方,没法做得很薄,随着智能手机越做越薄,转子马达已经无法满足空间尺寸的要求了。
所以转子马达被线性马达所取代。线性马达直接驱动质量块沿直线往复运动,就像敲钟一样,所以能做到“哒哒哒”的清脆效果,启停极快,手感更好。
虽然转子马达在手机上隐退,但作为震动技术的鼻祖,其在手机发展史上还是值得拥有姓名的,就算过气网红最后的倔强和体面吧。
