对焦,Focus,是一个摄影术语,即拍照前调整好透镜与成像面的距离,以使拍出来的照片清晰。在手机相机模组中,通过相机镜头中镜片的前后移动,改变像距的位置,使物像恰好落在CMOS传感器上。
失焦的照片是糊的。

对焦又分为自动对焦和手动对焦,当前手机上通常使用自动对焦。自动对焦,英文Auto Focus,简称AF,自动对焦又分为开环对焦(OLAF)和闭环对焦(CLAF)。开环对焦没有反馈回路,Driver无法知道Lens当前位置;闭环对焦通过Hall器件监测Lens当前位置,构成反馈回路,可以实现精准控制Lens行程及对焦效果。
对比度对焦
Contrast Detection Auto Focus,又称反差对焦,这是早期智能手机的对焦方式。
图像最清晰时,其边缘的明暗反差(对比度)最大;图像模糊时,对比度则较低。对焦马达会驱动镜头组前后移动,传感器会实时计算当前画面的对比度值。
反复确认:当镜头移动时,处理器发现对比度开始上升,它会继续朝这个方向移动。直到对比度达到一个峰值后开始下降,它就知道“峰值”处就是最焦点,然后再将镜头拉回到对比度最高的那个位置。
过程比喻:就像你在手动对焦时,来回拧动对焦环,寻找屏幕上看起来“最锐利”的那个瞬间。
优点是结构简单,不需要其他硬件支持,仅依靠软件算法即可实现。
缺点是速度慢,因为需要来回“寻找”最锐利的点,尤其在光线不佳、对比度低的场景下,会出现“拉风箱”现象(反复对焦无法合焦)。
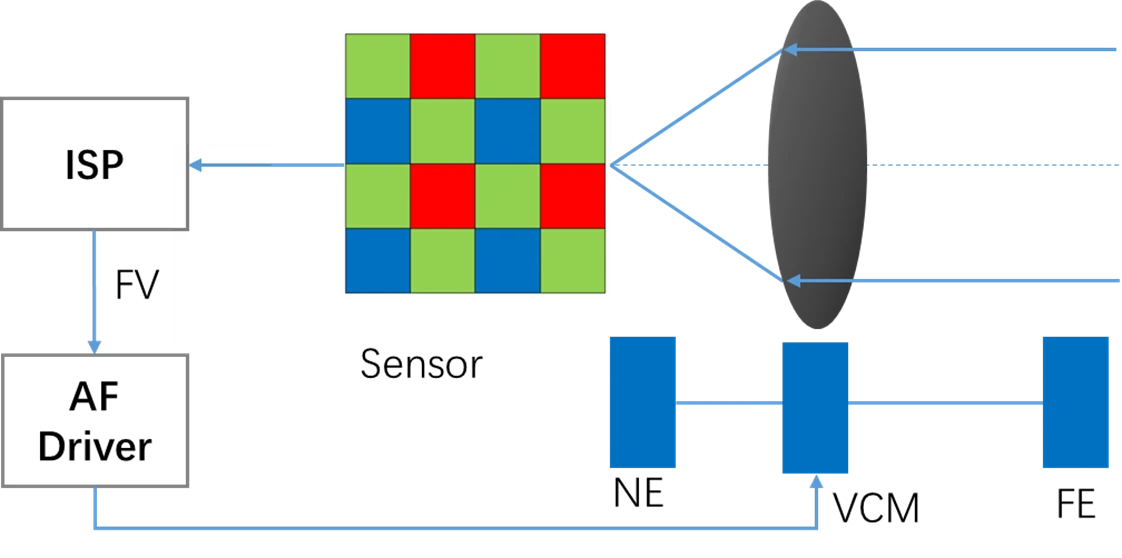
具体实现原理如下:AF算法从ISP得到统计信息FV(Focus Value),算出镜头下一次要移动的距离和方向,遍历完NE(Near End)和FE(Far End)后,选择FV最大的位置。
相位差对焦
简称PDAF,Phase Detection Auto Focus,这是目前智能手机上最主流的对焦技术。
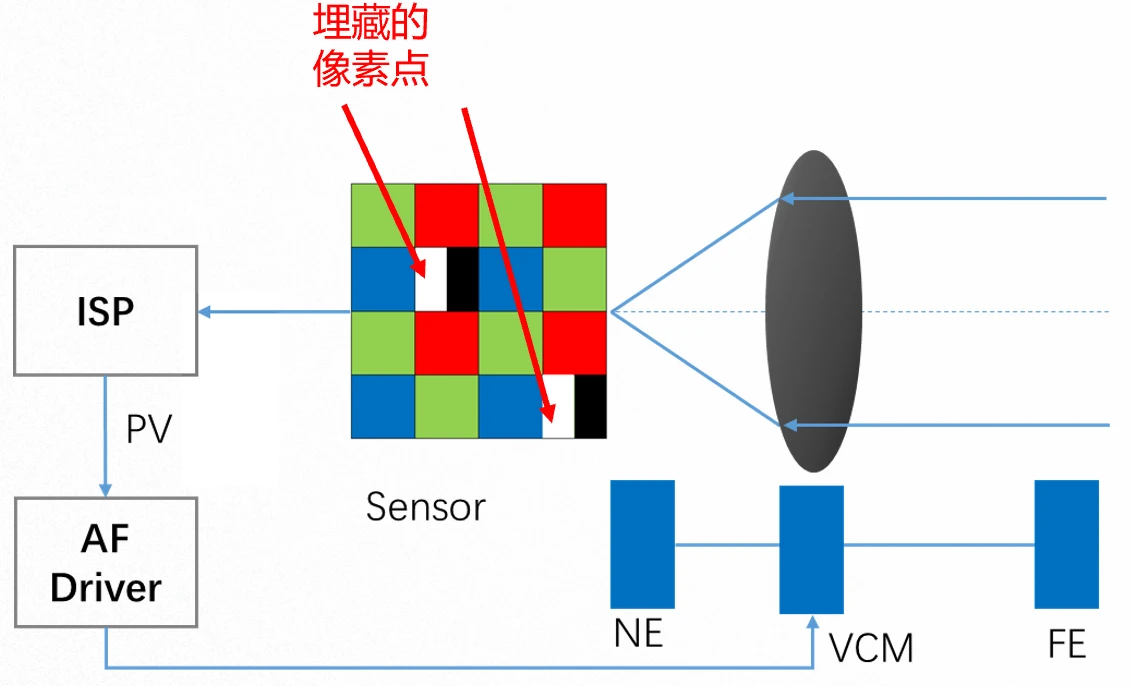
PDAF 的原理类似于人的双眼视差。它在图像传感器上埋藏了众多专用的相位检测像素点。这些像素点通常被成对地遮蔽其一半的进光量(一个像素只接收左侧的光,相邻的另一个只接收右侧的光)。
当对焦准确时,来自同一光源的一对光线会同时到达这一对像素上,它们输出的信号强度一致,相位差为零。
当失焦时,这两束光线就无法同时到达这对像素。处理器通过计算这两个信号之间的“相位差”,就能立刻判断出是前景深(向前模糊)还是后景深(向后模糊),并且通过ISP能直接计算出需要移动多少距离才能合焦。
一步到位,指令直接发给音圈马达,驱动镜头一次性移动到准确位置。因此速度快,无需反差对焦那样来回寻找对焦位置。可以连续计算相位差,非常适合拍摄运动物体(连续自动对焦,追焦)。
缺点是需要硬件支持,必须在传感器上制造特殊的像素点,会牺牲少量(约2-5%)的成像像素。此外,在光线非常弱时,相位检测像素可能无法获得足够的光信号来计算相位差,导致对焦性能下降。
激光对焦
上面说到的PDAF,它的原理决定了它的缺陷,即对低反差场景不敏感(比如纯色、没有纹理的墙面等),难以有效对焦。
而激光对焦,便可作为PDAF的强力补充,尤其在暗光或低反差场景下有显著对焦效果,完全不依赖环境光,即使在纯黑环境下也能快速测距对焦。
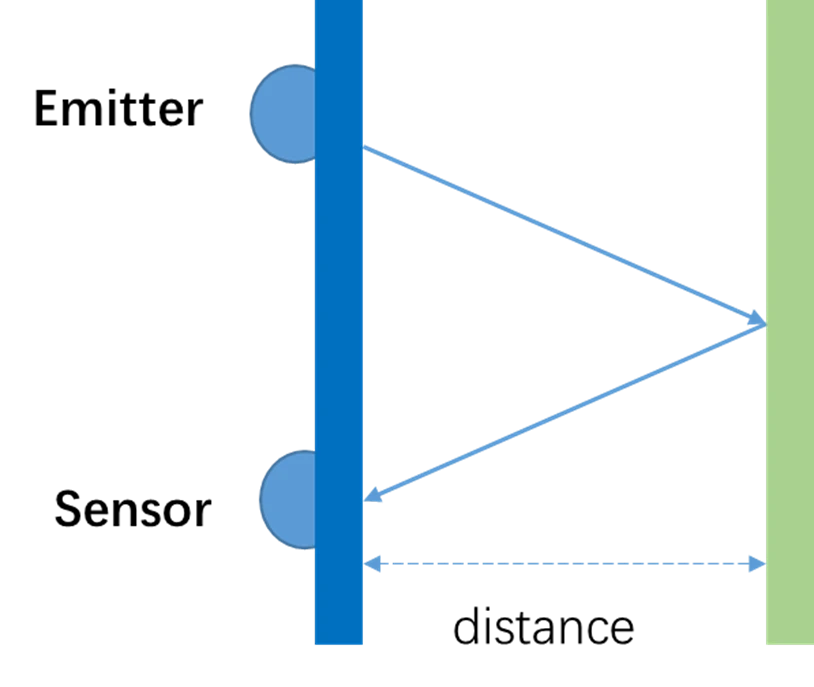
在摄像头旁边有一个小小的激光发射器和接收器。激光发射器可向被摄物体发射一束人眼不可见(人眼不可见但手机摄像头可见,见下图)的低功率激光;接收器接收到从物体反射回来的激光,通过计算激光往返的时间,就能计算出相机与被摄物体之间的物理距离。系统将这个距离数据直接转换成对焦马达的驱动指令,将镜头移动到对应的位置。

激光对焦的缺点也很明显,一是有距离限制,一般只在2米以内效果显著,超过后激光强度衰减,无法有效探测到回程的激光。对透明物体(玻璃)、强吸光物体(黑色绒布)效果不佳。此外,市场上有大量手机壳,设计时可能遮挡住了激光传感器,使激光对焦被屏蔽掉了,
